
Hardwired Vs. Micro-programmed Control Unit
In a system or computer, most of the tasks are controlled with the help of a processor or CPU (Central processing unit), which is the main component of a computer. The CPU usually has two main systems: control unit (CU) and arithmetic and logic unit (ALU). The control unit (CU) is used to synchronize the tasks with the help of sending timings and control signals. On the other hand, mathematical and logical operations can be handled with the help of ALU. Micro programmed control units and hardwired control units can be called two types of control units. We can execute an instruction with the help of these two control units.
In the hardwired control unit, the execution of operations is much faster, but the implementation, modification, and decoding are difficult. In contrast, implementing, modifying, decoding micro-programmed control units is very easy. The micro-programmed control unit is also able to handle complex instructions. With the help of control signals generated by micro-programmed and hardwired control units, we are able to fetch and execute the instructions.
Control Signals
In order to generate the control signals, both the control signals were basically designed. The functionality of a processor's hardware is operated with the help of these control signals. The control signals are used to know about various types of things, which are described as follows:
- Control signals are used to know what operation is going to be performed.
- It is used to know about the sequence of operations that are performed by the processor.
- It is used to know about the timing at which an operation must be executed and many other types of things.
Hardwired Control Unit
With the help of generating control signals, the hardwired control unit is able to execute the instructions at a correct time and proper sequence. As compared to the micro-programmed, the hardwired CU is generally faster. In this CU, the control signals are generated with the help of PLA circuit and state counter. Here the Central processing unit requires all these control signals. With the help of hardware, the hardwired control signals are generated, and it basically uses the circuitry approach.
The image of a hardwired control unit is described as follows, which contains various components in the form of circuitry. We will discuss them one by one so that we can properly understand the "generation of control signals".
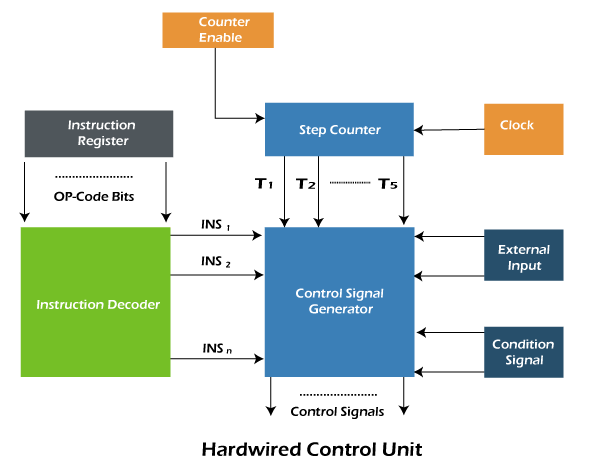
- The instruction register is a type of processor register used to contain an instruction that is currently in execution. As we can see, the instruction register is used to generate the OP-code bits respective of the operation as well as the addressing mode of operands.
- The above generated Op-code bits are received in the field of an instruction decoder. The instruction decoder interprets the operation and instruction's addressing mode. Now on the basis of the addressing mode of instruction and operation which exists in the instruction register, the instruction decoder sets the corresponding Instruction signal INSi to 1. Some steps are used to execute each instruction, i.e., instruction fetch, decode, operand fetch, Arithmetic and logical unit, and memory store. Different books might be contained different steps. But in general, we are able to execute an instruction with the help of these five steps.
- The information about the current step of instruction must be known by the control unit. Now the Step Counter is implemented, which is used to contain the signals from T1,…., T5. Now on the basis of the step which contains the instruction, one of the signals of a step counter will be set from T1 to T5 to 1.
- Now we have a question that how the step counter knows about the current step of instruction? So to know the current step, a Clock is implemented. The one-clock cycle of the clock will be completed for each step. For example, suppose that if the stop counter sets T3 to 1, then after completing one clock cycle, the step counter will set T4 to 1.
- Now we have a question, i.e., what will happen if the execution of an instruction is interrupted for some reason? Will the step counter still be triggered by the clock? The answer to this question is No. As long as the execution is current step is completed, the Counter Enable will "disable" the Step Counter so that it will stop then increment to the next step signal.
- Now we have a question, i.e., what if the execution of instruction depends on some conditions? In this case, the Condition Signals will be used. There are various conditions in which the signals are generated with the help of control signals that can be less than, greater than, less than equal, greater than equal, and many more.
- The external input is the last one. It is used to tell the Control Signal Generator about the interrupts, which will affect the execution of an instruction.
So, on the basis of the input obtained by the conditional signals, step counter, external inputs, and instruction register, the control signals will be generated with the help of Control signal Generator.
Micro-programmed Control Unit
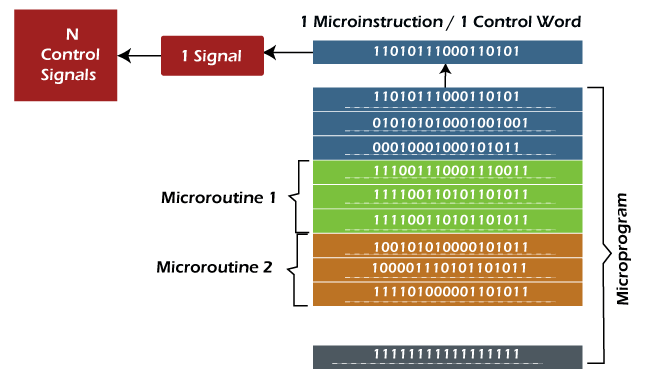
A micro-programmed control unit can be described as a simple logic circuit. We can use it in two ways, i.e., it is able to execute each instruction with the help of generating control signals, and it is also able to do sequencing through microinstructions. It will generate the control signals with the help of programs. At the time of evolution of CISC architecture in the past, this approach was very famous. The program which is used to create the control signals is known as the "Micro-program". The micro-program is placed on the processor chip, which is a type of fast memory. This memory is also known as the control store or control memory.
A micro-program is used to contain a set of microinstructions. Each microinstruction or control word contains different bit patterns. The n bit words are contained by each microinstruction. On the basis of the bit pattern of a control word, every control signals differ from each other.
Like the above, the instruction execution in a micro-programmed control unit is also performed in steps. So for each step, the micro-program contains a control word/ microinstruction. If we want to execute a particular instruction, we need a sequence of microinstructions. This process is known as the micro-routine. The image of a micro-programmed control unit is described as follows. Here, we will learn the organization of micro-program, micro-routine, and control word/ microinstruction.
Now we will learn about the organization of Micro-program CU. Then we will learn about the flow of instruction execution with the help of instruction execution steps, which are described as follows:
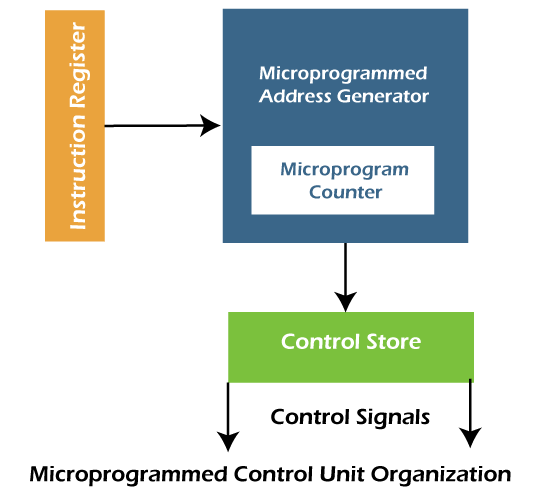
- Instruction fetch is the first step. In this step, the instruction is fetched from the IR (Instruction Register) with the help of a Microinstruction address register.
- Decode is the second step. In this step, the instructions obtained from the instruction register will be decoded with the help of a microinstruction address generator. Here we will also get the starting address of a micro-routine. With the help of this address, we can easily perform the operation, which is mentioned in the instruction. It will also load the starting address into the micro-program counter.
- Increment is the third step. In this step, the control word, which corresponds to the starting address of a micro-program, will be read. When the execution proceeds, the value of the micro-program counter will be increased so that it can read the successive control words of a micro-routine.
- End bit is the fourth step. In this step, the microinstruction of a micro-routine contains a bit, which is known as the end bit. The execution of the microinstruction will be successfully completed when the end bit is set to 1.
- This is the last step, and in this step, the micro-program address generator will again go back to Step 1 so that we can fetch a new instruction, and this process or cycle goes on.
So in the micro-programmed control unit, the micro-programs are stored with the help of Control memory or Control store. The implementation of this CU is very easy and flexible, but it is slower as compared to the Hardwired control unit.
Differences between Hardwired Control unit and Micro-programmed Control unit
There are various differences between Micro-programmed CU and Hardwired CU, which are described as follows:
| Hardwired Control Unit | Micro-programmed Control Unit |
|---|---|
| With the help of a hardware circuit, we can implement the hardwired control unit. In other words, we can say that it is a circuitry approach. | While with the help of programming, we can implement the micro-programmed control unit. |
| The hardwired control unit uses the logic circuit so that it can generate the control signals, which are required for the processor. | The micro-programmed CU uses microinstruction so that it can generate the control signals. Usually, control memory is used to store these microinstructions. |
| In this CU, the control signals are going to be generated in the form of hard wired. That's why it is very difficult to modify the hardwired control unit. | It is very easy to modify the micro-programmed control unit because the modifications are going to be performed only at the instruction level. |
| In the form of logic gates, everything has to be realized in the hardwired control unit. That's why this CU is more costly as compared to the micro-programmed control unit. | The micro-programmed control unit is less costly as compared to the hardwired CU because this control unit only requires the microinstruction to generate the control signals. |
| The complex instructions cannot be handled by a hardwired control unit because when we design a circuit for this instruction, it will become complex. | The micro-programmed control unit is able to handle the complex instructions. |
| Because of the hardware implementation, the hardwired control unit is able to use a limited number of instructions. | The micro-programmed control unit is able to generate control signals for many instructions. |
| The hardwired control unit is used in those types of computers that also use the RISC (Reduced instruction Set Computers). | The micro-programmed control unit is used in those types of computers that also use the CISC (Complex instruction Set Computers). |
| In the hardwired control unit, the hardware is used to generate only the required control signals. That's why this control unit is faster as compared to the micro-programmed control unit. | In this CU, the microinstructions are used to generate the control signals. That's why this CU is slower than the hardwired control unit. |
Some Other differences between Micro-programmed control unit and Hardwire control unit
Now we will describe these differences on the basis of some parameters, such as speed, cost, modification, instruction decoder, control memory, etc. These differences are described as follows:
Speed
In the hardwired control unit, the speed of operations is very fast. In contrast, the micro-programmed control unit needs frequent memory access. So the speed of operation of a micro-programmed control unit is slow.
Modification
If we want to do some modifications to the Hardwired control unit, we have to redesign the entire unit. In contrast, if we want to do some modification in the micro-programmed control unit, we can do that just by changing the microinstructions in the control memory. In this case, the more flexible control unit is a micro-programmed control unit.
Cost
The implementation of a Hardwire control unit is very much compared to the Micro-programmed control unit. In this case, the micro-programmed control unit will save our money at the time of implementation.
Handling Complex Instructions
If we try to handle the complex instructions with the help of a hardwired control unit, it will be very difficult for us to handle them. But if we try to handle the complex instructions with the help of micro-programmed control unit, it will be very easy for us to handle them. In this case also, the Micro-programmed control unit is better.
Instruction decoding
In the hardwired control unit, if we want to perform instruction decoding, it will be very difficult. But if we do the same thing in a micro-programmed control unit, it will be very easy for us.
Instruction set size
A small instruction set is used by the hardwired CU. On the other hand, a large instruction set is used by the micro-programmed control unit.
Control Memory
The hardwired control unit does not use the control memory to generate the control signals, but the micro-programmed CU needs to use the control memory to generate the control signals.
Applications
The hardwired control unit is used in those types of processors that basically use a simple instruction set. This set is called a Reduced Instruction Set Computer. On the other hand, a micro-programmed control unit is used in those types of processors that basically use a complex instruction set. This set is called a Complex Instruction Set Computer.
Conclusion
In conclusion, we can say that the Hardwired control unit is a type of sequential circuit used to generate the control signals. In contrast, the micro-programmed control unit is a type of unit used to contain the microinstruction in the control memory so that they can generate the control signals. This is the main difference between both the control units. The similarity between hardwired and micro-programmed control units is that both control units generate the 'Control Signals'.
