Canny Edge Detection
Edge detection is term where identify the boundary of object in image. We will learn about the edge detection using the canny edge detection technique. The syntax is canny edge detection function is given as:
edges = cv2.Canny('/path/to/img', minVal, maxVal, apertureSize, L2gradient)
Parameters-
- /path/to/img: file path of the image (required)
- minVal: Minimum intensity gradient (required)
- maxVal: Maximum intensity gradient (required)
- aperture: It is optional argument.
- L2gradient: Its default value is false, if value is true, Canny () uses a more computationally expensive equation to detect edges, which provides more accuracy at the cost of resources.
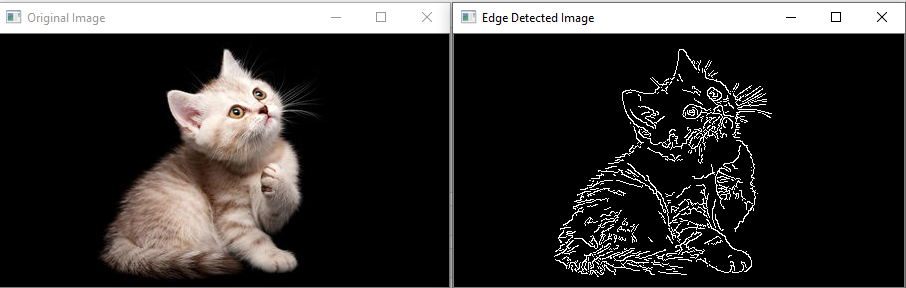
Example: 1
import cv2
img = cv2.imread(r'C:\Users\DEVANSH SHARMA\cat_16x9.jpg')
edges = cv2.Canny(img, 100, 200)
cv2.imshow("Edge Detected Image", edges)
cv2.imshow("Original Image", img)
cv2.waitKey(0) # waits until a key is pressed
cv2.destroyAllWindows() # destroys the window showing image
img = cv2.imread(r'C:\Users\DEVANSH SHARMA\cat_16x9.jpg')
edges = cv2.Canny(img, 100, 200)
cv2.imshow("Edge Detected Image", edges)
cv2.imshow("Original Image", img)
cv2.waitKey(0) # waits until a key is pressed
cv2.destroyAllWindows() # destroys the window showing image
Output:
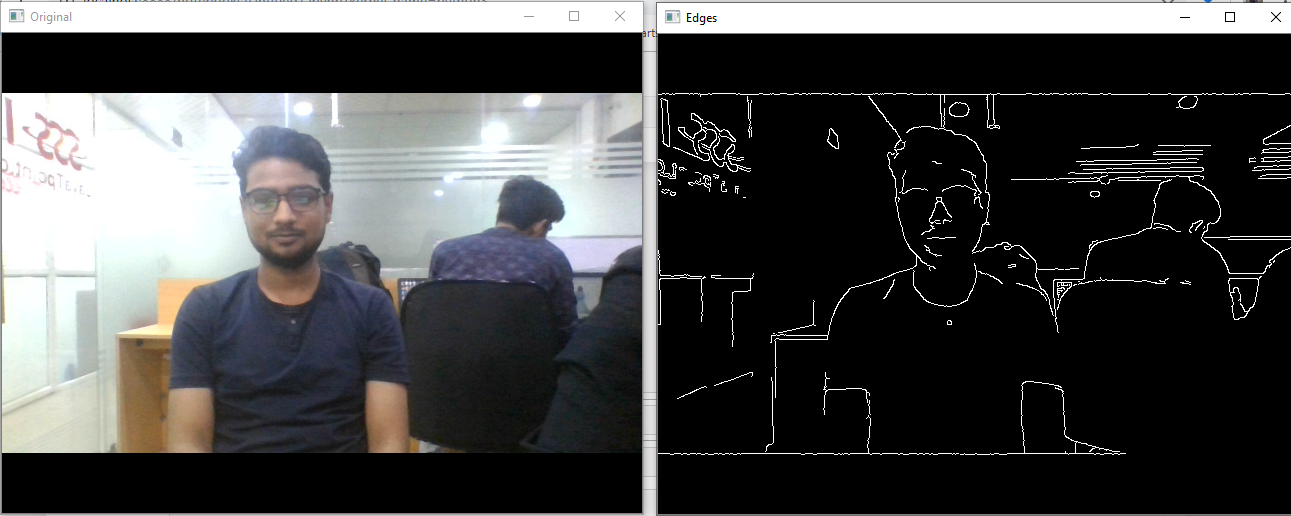
Example: Real Time Edge detection
# import libraries of python OpenCV
import cv2
# import Numpy by alias name np
import numpy as np
# capture frames from a camera
cap = cv2.VideoCapture(0)
# loop runs if capturing has been initialized
while (1):
# reads frames from a camera
ret, frame = cap.read()
# converting BGR to HSV
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# define range of red color in HSV
lower_red = np.array([30, 150, 50])
upper_red = np.array([255, 255, 180])
# create a red HSV colour boundary and
# threshold HSV image
mask = cv2.inRange(hsv, lower_red, upper_red)
# Bitwise-AND mask and original image
res = cv2.bitwise_and(frame, frame, mask=mask)
# Display an original image
cv2.imshow('Original', frame)
# discovers edges in the input image image and
# marks them in the output map edges
edges = cv2.Canny(frame, 100, 200)
# Display edges in a frame
cv2.imshow('Edges', edges)
# Wait for Esc key to stop
k = cv2.waitKey(5) & 0xFF
if k == 27:
break
# Close the window
cap.release()
# De-allocate any associated memory usage
cv2.destroyAllWindows()
import cv2
# import Numpy by alias name np
import numpy as np
# capture frames from a camera
cap = cv2.VideoCapture(0)
# loop runs if capturing has been initialized
while (1):
# reads frames from a camera
ret, frame = cap.read()
# converting BGR to HSV
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# define range of red color in HSV
lower_red = np.array([30, 150, 50])
upper_red = np.array([255, 255, 180])
# create a red HSV colour boundary and
# threshold HSV image
mask = cv2.inRange(hsv, lower_red, upper_red)
# Bitwise-AND mask and original image
res = cv2.bitwise_and(frame, frame, mask=mask)
# Display an original image
cv2.imshow('Original', frame)
# discovers edges in the input image image and
# marks them in the output map edges
edges = cv2.Canny(frame, 100, 200)
# Display edges in a frame
cv2.imshow('Edges', edges)
# Wait for Esc key to stop
k = cv2.waitKey(5) & 0xFF
if k == 27:
break
# Close the window
cap.release()
# De-allocate any associated memory usage
cv2.destroyAllWindows()
Output: